Que tal steemians muy buenas tardes!! Como les había prometido previamente el día de hoy he venido con más material de lo que han sido las clases de lego que estoy cursando en la Universidad.
Anoche tuve la clase de lego la cuál consistió en armar el mismo prototipo el cual es el "vehículo Educator" pero con la diferencia de incluirle un sensor de color el cual "es un sensor digital que puede detectar el color o la intensidad de la luz que entra por la pequeña ventana de la cara del sensor. Reconoce 7 colores: negro, azul, verde, amarillo, rojo, blanco y sin color" (http://canaltic.com/rb/legoev3/142_sensor_de_color.html).

Fotografía tomada del sitio: http://canaltic.com/rb/legoev3/142_sensor_de_color.html
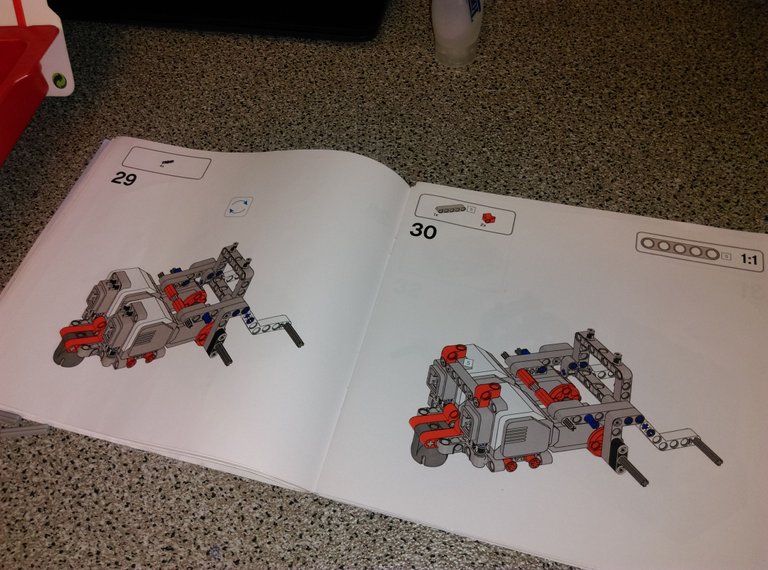
A continuación les mostraré el armado del prototipo "vehiculo educator"

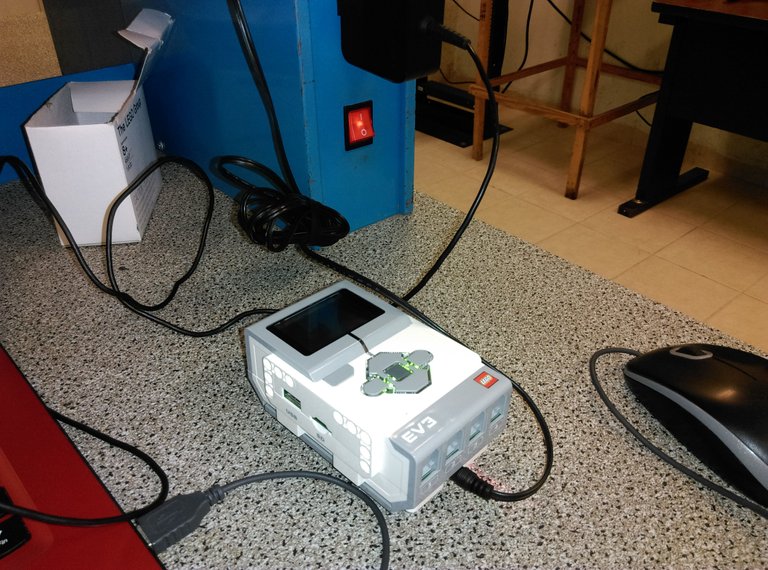
Inicialmente las piezas las retiramos de su contenedor principal y preparamos los componentes principales los cuales son el cargador de la batería, la batería recargable y el bloque EV3 el cual es el centro de control de todo el robot.
Es muy importante que antes de comenzar a ensamblar el bloque EV3 recarguemos la batería del mismo como muestro a continuación:
Posteriormente a armar lo más básico que es ensamblar los motores obtenemos lo siguiente:
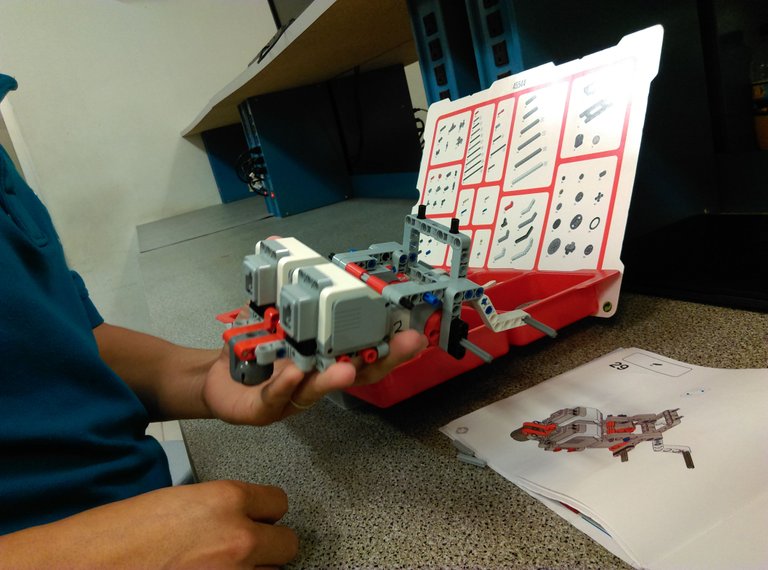
Una vez obtuvimos el resultado deseado, nos queda ensamblar el bloque EV3 la base del armado que ya se tiene:


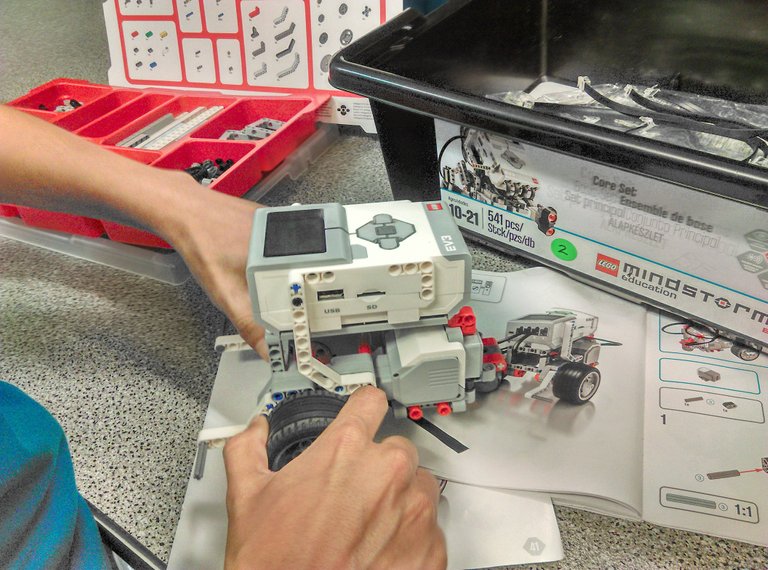
Ahora pasaremos a ensamblar las llantas del vehiculo las cuales obviamente le permitirán ir a todo terreno :)
Una vez realizado el ensamblado completo de nuestro vehículo ahora queda programarlo vía bluetooth con el software educativo: LEGO MINDSTORMS Education!
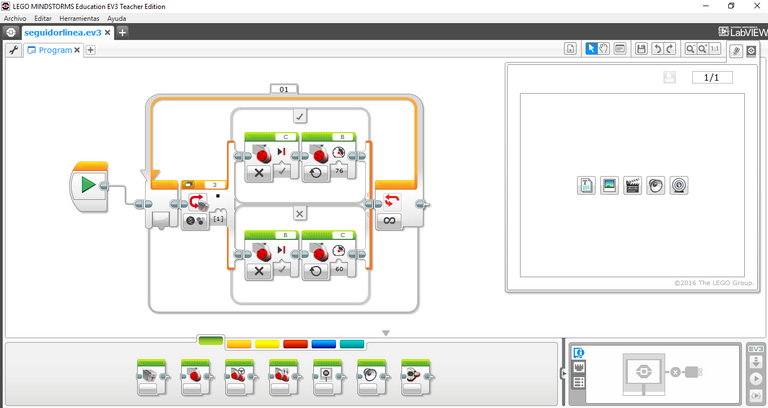
El software tiene una interfaz muy amigable por lo cuál la programación del vehículo fue a travéz de bloques de instrucción, algo así como Blockly de google, que dado a ciertos bloques, se ejecutan diversas funciones.
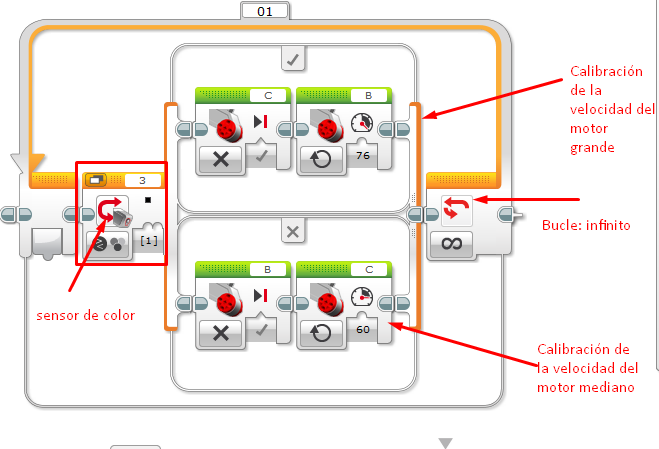
En este código se puede apreciar un bucle (bloques naranjas) los cuales harán que nuestro vehículo siga su curso hasta que detengamos el programa y así mismo contiene la instrucción del sensor de color y dentro de ese bucle se encuentran los bloques verdes que son de los motores.
A continuación ejecutamos el programa y miramos el resultado:
y en este otro video, les comparto lo que sucede si no se calibra bien la velocidad de los motores, ya que al moverse muy rapido el motor del lado del sensor, no detecta el color negro por lo tanto gira hasta tratar de encontrarlo.
Este post ha sido votado por @lince.
El contenido de esta publicación puede estar relacionada con algún tipo de plagio o abuso relacionado con No incluir las fuentes de imágenes que no son propias. Te sugerimos leer la siguiente publicación para evitar publicar contenido clasificado como plagio o abuso en el futuro: Plagio de imágenes, ¿cómo evitarlo?.
No tiene nada de malo apoyarse de contenido de internet, solo procura citar la fuente de donde se obtuvo la imagen o fotografía, que en este caso se encuentra Aquí.
Esto no es una bandera, es una recomendación para que leas el post de @lince y en el futuro evites cometer algún tipo de abuso.
Steemit es una plataforma en la que se recompensa el trabajo original y propio. Si existe alguna duda sobre cómo puedes evitar el plagio y abuso favor de leer las publicaciones informativas de @lince.
Para cualquier aclaración los medios de comunicación son por correo a lince.steemit@gmail.com o en los chats de discord y steemit.chat.
Muchas gracias, ahora he hecho las referencias correspondientes de donde se tomó cierta información relacionada a mi post. Saludos y gracias!
Hola @emilioc! me gusto mucho tu post, sólo que te falto añadir la fuente de información del primer texto:
http://canaltic.com/rb/legoev3/142_sensor_de_color.html
Estos temas son de mucho interés, saludos!
Muy cierto, y gracias por tus comentarios, desconocía este hecho. Ahora lo edito!! y Gracias de nuevo por tomarte tu tiempo revisando mi post! Saludos!
Muy bueno..