오늘 강의는 '무인자동차'에 대해서 배웠습니다. 저도 4차 산업혁명하면 자율주행차,무인자동차,카쉐어링 등등 들어보았는데요. '모빌리티혁명'이라고 한다고 합니다. 모든것이 다 융합된 기술이라고 생각하면 될 것 같습니다.

무인자동차의 작동원리를 살펴보겠습니다.
- 무인자동차의 첫 번째 핵심기술은 무인자동차 시스템입니다. 구동장치인 가속기, 감속기 및 조향장치 등을 무인화 운행에 맞도록 구현하고, 소프트웨어와 하드웨어를 이용하여 무인자동차를 제어하는 역할을 합니다.
- 두 번째 핵심기술은 센서를 이용하여 시각정보를 입력받고 처리하는 것입니다. 이 기술은 CCD 카메라뿐만 아니라 초음파 센서 등의 여러 가지 센서를 사용하여 장애물을 회피하고 돌발상황에 대처할 수 있도록 합니다.
- 세 번째 핵심기술은 지능제어 및 지능운행 장치입니다. 이 기술을 이용하면 숙련된 운전자의 운전방식을 학습함으로써 복잡한 모델링 없이 무인자동차를 제어할 수 있습니다.
- 네 번째 핵심기술은 조향 알고리즘입니다. 차량의 운행 경로를 최종적으로 결정하는 요소인 조향은 무인자동차가 주어진 경로를 안정적으로 주행하기 위해, 또한 발생하는 오차를 최소화하기 위해 필요합니다.
- 이 중에서 무인자동차의 핵심은 무엇보다도 현재의 위치를 cm 수준으로 정밀하게 파악하는 기술입니다. 이를 위해서는GPS, 레이저 스캐너, 레이더, 카메라는 기본이고, 관성항법장치 등의 첨단센서가 총동원되죠. 특정 센서만 가지고는 무인 자동차가 겪을 돌발 상황을 제대로 대처하기가 어려우므로 가급적 다양한 종류의 센서를 장착해야 합니다. 무인자동차에 쓰이는 GPS는 오차범위가 10cm에 불과할 정도로 정밀해야 합니다.
생각만해도 무인자동차가 상용화된 세상이 기대가 됩니다!
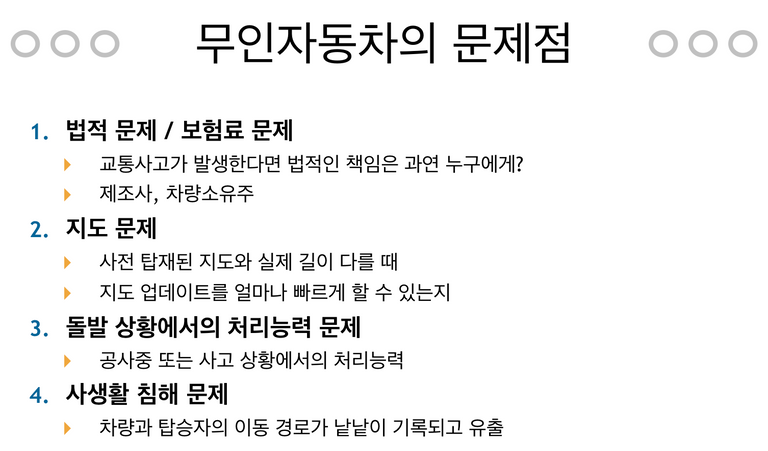
하지만 무인자동차의 문제점이 존재 할 수 있습니다. 문제점은 아래와 같습니다.
또 법이나 지도 같은 문제 말고도 해결 할 수 없는 문제들이 있습니다. 그러한 문제를 '무인차의 딜레마'라고 합니다.
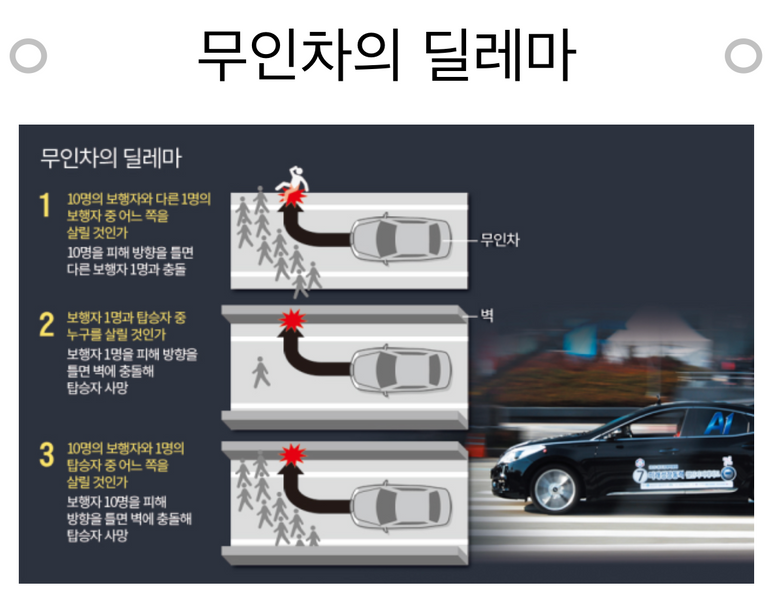
여러분이라면 위와 같은 상황에서 어떻게 해결하실건가요? 저도 참 뭐라고 말하기가 어려운 상황같습니다..^^;
결과적으로 무인자동차로 인해서 미래의 자동차 시스템은
- 모두 네트워크의 일부로서 움직이게 됩니다.
- 개별 자동차 한 대 한 대가 모두 교통시스템의 일부로 통합됩니다.
- 도로들은 그 위를 운행하는 자동차와 곧바로 연결되어 각종 데이터를 교환하며, 도로상황이나 표지판과 같은 다양한 정보를 실시간으로 갱신할 수 있도록 만드는 게 목표입니다.
10년 뒤에는 자동차를 굳이 구입하지 않아도 되는 세상이 정말 올 것 같습니다^_^