아이젝 마케팅&커뮤니케이션팀 한국 매니저 강재서입니다.
기술의 취지와 전망이 좋은 것, 물론 중요하죠. 그러나, 이보다 더 중요한 것은 기술이 과연 실제로 구현되고 사용될 수 있는지, 즉 상용화될 수 있는지 입니다. 따라서, 아이젝에서는 아이젝 네트워크를 이용하는 댑의 실제 사용사례를 매주마다 보여드리고 있습니다. 그동안, 머신러닝, AI, 딥러닝, 과학 연구, 렌더링 등 다양한 댑을 보여드렸었는데요.
이번 주 보여드릴 분야는 ‘SLAM 로봇’입니다. SLAM 로봇은 낯선 환경에서도 외부의 도움 없이, 주변 환경을 직접 분석하고 지도를 작성하는 로봇입니다. 따라서, 미래에는 인간이 갈 수 없는 위험한 지대에 이 로봇을 보내서 분석할 수 있습니다. 또, 이러한 낯선 환경에서의 공간파악하는 기술은 무인 자동차, 즉 자율주행 자동차의 핵심 기술로 각광받고 있습니다.
시간이 없으신 분들은 아래 동영상이라도 시청해보시길 권고합니다. 동영상에 나오는 SLAM 로봇은 상하이 과기대에서 개발한 것으로, 로봇 구동에 필요한 막대한 컴퓨팅 파워를 아이젝 네트워크를 통해 충당받게 됩니다. 보시다시피, 이 로봇은 아이젝 네트워크와 연결되어, 외부 도움없이 지도 작성에 성공했습니다.
이 글에서 전해드릴 또 하나의 기쁜 소식은 아이젝과 협업하는 세계적인 연구기관이 두개나 늘었다는 것입니다. 그동안 아이젝은 중국과학원(CAS), 프랑스 국립 과학연구소(CNRS), 프랑스 국립 컴퓨터 과학 연구센터(INRIA) 등 세계 유수의 연구기관과 협업해왔습니다. (https://steemit.com/iexec/@jkarim/7ptnyv-iexec 참고) 또한, 중국 칭화대학교가 accelerate(지원)해왔었죠. 이번에 아이젝의 협업기관으로 두 개의 거대 연구기관이 추가되었습니다.
하나는, 상하이 과학기술대학교로, 중국 정부와 중국과학원이 과학, 기술 인재 양성을 위해 최근에 설립한 학교입니다. 노벨상 수상자 3명을 스카우트하여 교수로 임용할 정도로, 중국정부가 파격적으로 지원하고 있다고 합니다. 두 번째는, 상하이 포그 컴퓨팅 기술 위원회(SHIFT)입니다. SHIFT는 상하이 과기대, 상하이 마이크로시스템 정보기술 연구소, 그리고 중국과학원이 합심하여 만든 합동 연구기관입니다. 연구의 주안점은 포그컴퓨팅에서의 빅데이터와 보안, 그리고 포그와 사물인터넷을 이용한 차세대 커뮤니케이션에 맞춰져 있습니다.
이제 Dapp of the week #6 번역된 내용 만나보시죠.!
아이젝 , 이 주의 댑 #6 상하이 과학기술대학교 로봇
이번 ‘이 주의 댑 시리즈’ 내용에는 독자 여러분이 흥미를 느낄만한 요소가 포함되어 있습니다. 바로 로봇입니다!
밑에 동영상을 클릭하시면 아이젝 인터페이스를 이용하여 실제로 작동하는 로봇을 만나보실 수 있습니다.
아이젝은 이제, 상하이 과기대, 특히 SHIFT(상하이 포그 컴퓨팅 기술 위원회) 와 협업을 맺게 되었습니다. 아이젝 공동창립자인 Haiwu He, 아이젝 보안 기술 팀장인 Lei Zhang와 중국과학원 Zhou Minguto과의 논의가 협업으로까지 이어진 것입니다.
이번 주에 소개해드릴 Dapp은 ‘SLAM Robot’ 이라는 이름으로 아이젝 댑 스토어에 올라와있는 상태입니다. ‘SLAM’은 Simultaneous Localization and Mapping(동시적 위치추정 및 지도작성)의 약자입니다. 이 댑은 아이젝 네트워크를 통해서 컴퓨팅 작업을 수행하게 되며, 이에 대해 글의 후반부에 자세히 설명하도록 하겠습니다.
상하이 포크 컴퓨팅 기술 위원회에 있는 SLAM 로봇 연구기관
상하이 포그 컴퓨팅 기술 위원회(SHIFT)는 상하이 과기대, 상하이 마이크로시스템 정보기술 연구소, 그리고 중국과학원이 합심하여 만든 합동 연구기관입니다. 그들의 연구는 시스템 구성, 포그컴퓨팅에서의 빅데이터와 보안, 그리고 포그와 사물인터넷을 이용한 차세대 커뮤니케이션에 주안점을 두고 있습니다.
SHIFT에서의 로봇은 ‘ROS’(로봇에서 일반적으로 사용되는 분산 작동시스템)에 기반을 두고 있습니다, 그리고 그것은 사륜 구동 자동차와 다음과 같은 다양한 환경감지 센서를 특징으로 합니다: 카메라, IMU 측정 단위, 온도/습도 센서, 마이크로폰, 레이저 굴절기 측정, 주행기록계 등. 이러한 로봇의 파워를 처리하는 것은 주로 Ubuntu OS에서 구동하는 로즈베리파이 3B로 이루어집니다, 그리고 그것은 와이파이를 통해 네트워크에 연결되어있습니다.
아이젝에 의해 파워를 공급받는 ‘SLAM’ 맵핑(지도를 만드는 것) 로봇
현재, 이 상하히 과기대 로봇의 주요 기능은 동시적 위치 추정 및 지도작성을 뜻하는 ‘SLAM’입니다. 간단하게 설명하자면, 센서를 사용하여 어떤 공간에서 정확한 위치에 대한 구체적인 정보를 수집하고, 취합한 데이터를 바탕으로 연산을 하여 상세한 지도를 작성하는 것을 말합니다.
이 지도는 주위 환경에서 길을 더 효율적으로 찾고, 장애물을 피하는 미래 로봇에 사용될 수 있습니다. 이 SLAM 연구기관은 이 하드웨어와 연산을 서비스로서 제공하고, 지도를 최종결과물로 제공하는 것을 꿈꾸고 있습니다. 우리는 그러한 맵핑의 다양한 실사용예를 상상해볼 수 있습니다. (자동화된 드론 등)
기술 세부설명
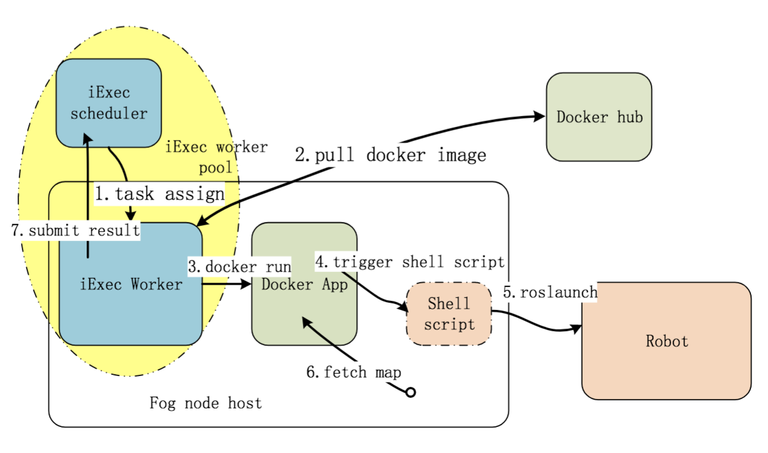
위 도표는 블록체인 네트워크를 통해 아이젝 시장과 연결된 오프-체인 네트워크를 나타내고 있습니다. 아이젝 워커 서비스는 SHIFT site에 있는 포그 노드에 배치됩니다. 아이젝 댑스토어와 아이젝 마켓을 통해 이러한 포그 기반의 컴퓨팅을 시작할 수 있습니다.
기본적으로, 오프-체인 시작점(entrypoint) 도커 애플리케이션이 시작되면, 이 애플리케이션은 먼저 이동로봇과 커넥션을 구축하고, SLAM 업무를 시작합니다. 이 로봇은 측정 절차를 시작하여 지도를 만들고, 이 결과를 시작점에 있는 도커 컨테이너에 다시 전송합니다. 그리고 나서 포그 노드에 배치된 아이젝 서비스는 결과를 아이젝 스케쥴러에 넣고 기여 증명(Poco) 절차를 시작합니다. 유저들은 이 인증절차가 끝나면 결과를 다운받을 수 있습니다.
SHIFT에 배치된 로봇은 다기능적이고 실생활에 다양하게 적용될 수 있습니다. 게다가, 아이젝은 블록체인 기반의 포그 컴퓨팅에 대해 노력하고 있는데, SHIFT와 협업하여 스마트 공정을 위한 블록체인 기반 솔루션을 제공할 것입니다.
아이젝과 사물인터넷의 미래
사물인터넷(loT)은 우리 아이젝에서 가장 흥미롭게 보는 실사용 사례 중 하나입니다. 이와 관련된 프로젝트는 아직 탐구의 영역에 그치고 있는 것이 사실입니다. 그러나 우리가 상상하는 미래에는, 사물인터넷 기술을 이용하는 수많은 비즈니스 사용사례가 쏟아져 나올 것입니다. 예를 들어, 인간이 접근하기에 너무 넓거나 위험해서 탐험능력을 가진 로봇들을 배치하는 건축가를 상상해보세요! 아이젝이 이러한 아름다운 탈중앙화된 어플리케이션에 파워를 공급하게 된다면 커뮤니티원 모두가 자랑스러워 하겠죠??
또 다른 아이젝 뉴스
팀은 데브콘4와 프라하에서 11월 2일 금요일 오후 2시에 열리는 아이젝 서밋&파티 준비에 박차를 가하고 있습니다. 게스트들로부터 기술에 대한 훌륭한 연설도 듣고, 워크샵도 예정되어있습니다.(인텔, Parity, 유비소프트 등에서 온 게스트) 그리고, 우리는 음식, 술 그리고 훌륭한 기업들과 함께 파티를 진행할 예정입니다.
늘 잘보고 있습니다. 아이젝 공식 한국 매니저 우리 방장님 !!